

杏彩体育官网入口网址·电液伺服阀的应用场景_电液伺服阀维修操作程序
来源:杏彩体育官网网址 作者:杏彩体育官网入口2024-05-21 06:56:18电液伺服阀由于其高精度和快速控制能力,除了航空航天和军事装备普遍使用的领域外,在机床、塑料、轧钢机、车辆等各种工业设备的开环或闭环的电液控制系统中。特别是系统要求高的动态响应、大的输出功率的场合获得了广泛应用。
(1)电液伺服阀的位置控制回路。图172所示为电液伺服阀控制的液压缸直线 (a)所示为其原理图,图172 (b)所示为其职能方框图。当系统由指令电位器输入指令信号后,电液伺服阀2的电气机械转换器动作,通过液压放大器(先导级和功率级)将能量转换放大后,液压源的压力油经电液伺服阀向液压缸3供油,驱动负载到预定位置,反馈电位器(位置传感器)检测到的反馈信号与输入指令信号经伺服放大器1比较,使执行器精度运动在所需位置上。
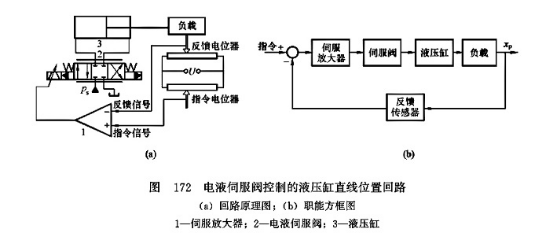
图173所示为电液伺服阀控制的直线 (a)所示为其原理图,图173 (b)所示为其职能方框图。当系统输入指令信号后,由能量转换放大,液压源的压力油经电液伺服阀2向3供油,齿轮减速器4和丝杠螺母机构5将马达的回转运动转换为负载的直线运动,位置传感器检测到的反馈信号与输入指令信号经伺服放大器1比较,使负载精度运动在所需位置上。
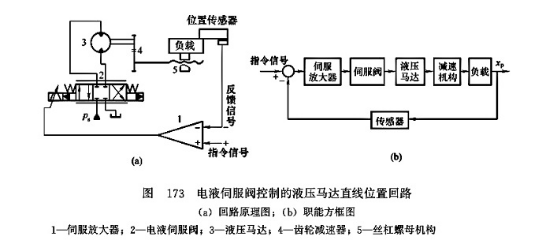
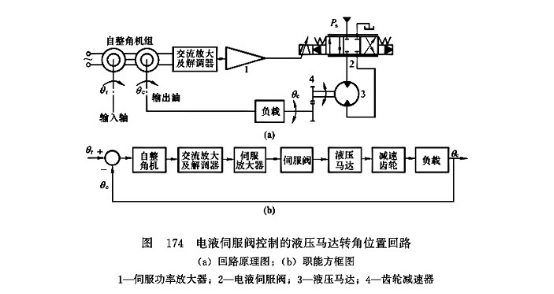
图174所示为电液伺服阀控制的转角位置回路,图174 (a)所示为其原理图,图174 (b)所示为其职能方框图。它采用白整角机组作为角差测量装置(3根线表示定子绕组的引出线根线表示转子绕组的引出线,通过圆心的点画线表示转轴),输入轴与发送机轴相连,输出轴与接收机相连。自整角机组检测输入轴和输出轴之间的角插,并将角差转换为振幅调制渡电压信号,经交流放大器放大和解调器解调后,将交流电压信号转换为直流电压信号,再经伺服功率放大器l放大,产生一个差动电流去控制电液伺服阀2,液压能量放大后,液压源的压力油经电液伺服阀2向3供油,马达通过齿轮减速器4驱动负载作回转运动,经上述反馈信号与输入指令信号的比较,使负载精确运动在所需转角位置上。
(2)电液伺服阀的速度控制回路。图175所示为利用电液伺服阀控制双向定量回转速度保持一定值的回路,图175 (a)所示为其原理图,图175 (b)所示为其职能方框图。当系统输入指令信号后,电液伺服阀2的电气机械转换器动作,通过液压放大器(先导级和功率级)将能量转换放大后,液压源的压力油经电液伺服阀向双向3供油,使驱动负载以一定转速工作;同时,测速电动机(速度传感器)4的检测反馈信号uf与输入指令信号经伺服放大器1比较,得到的误差信号控制电液伺服阀的阀口开度,从而使执行器转速保持在设定值附近。
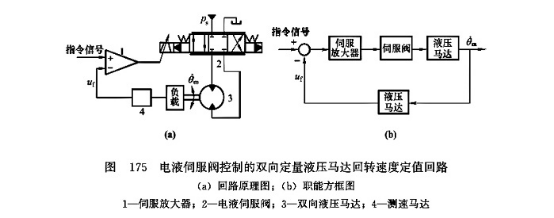
图176所示为开环变量泵控制的速度回路,图176 (a)所示为其原理图,图176 (b)所示为其职能方框图。双向变量液压泵5、双向定量6及安全溢流阀组7和补油单向阀组8组成闭式油路,通过改变变量泵5的排量对6调速。而变量泵的排量调节通过电液伺服阀2控制的双杆液压缸3的位移调节来实现。执行元件及负载与电液伺服闷控制的液压缸之间是开环的。当系统输人指令信号后,控制液压源的压力油经电液伺服阀2向双杆液压缸3供油,使液压缸驱动变量泵的变量机构在一定位置下工作;同时,位置传感器4的检测反馈信号与输入指令信号经伺服放大器1比较,得出的误差信号控制电液伺服阀的阀口开度,从而使变量泵的变量机构即变量泵的排量保持在设定值附近,最终保证6在希望的转速值附近工作。
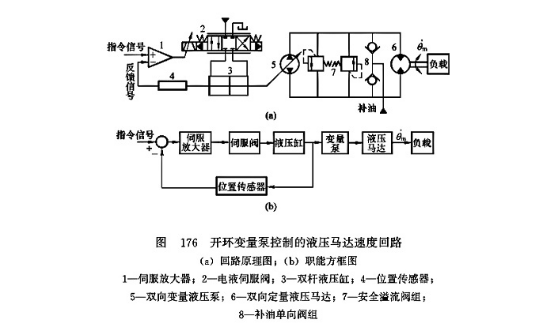
图177所示为闭环变量泵控制的速度回路,图177 (a)所示为其原理图,图177 (b)所示为其职能方框图。其中油路结构与图176所示开环变量泵控制的速度回路基本相同,所不同的是在负载与指令机构间增设了测速电动机(速度传感器)9,从而构成一个闭环速度控制回路。因此其速度控制精度更高。

(3)电液伺服阀的力和压力控制回路。图178 (a)所示为电液伺服阀的力控制回路.油源经电液伺服阀2向双杆液压缸3供油,液压缸产生的作用力施加在负载上,力传感器4的检测反馈信号与输人指令信号经伺服放大器1比较,再通过电液伺服阀控制缸的动作,从而保持负载受力的基本恒定。图178(b)所示为维持双杆液压缸两腔压力差恒定的控制回路,当电液伺服阀2接受输入指令信号并将信号转换放大后,使双杆液压缸3两腔压力差达到某一设定值。缸内压力变化时,液压缸近旁所控制的压差传感器5的检测反馈信号与输人信号指令经伺服放大器1比较,再通过电液伺服阀控制缸的动作,从而保持液压缸两腔压差的基本恒定。图178(c)所示为电液伺服阀的力和压力控制回路的职能方框图。
(4)电液伺服阀的液压缸同步控制回路。图179所示为利用电液伺服阀放油的液压缸同步控制回路。分流阀6用于粗略同步控制,再用电液伺服阀5根据位置误差检测器(差动变压器)3的反馈信号进行旁路放油,实现精确的同步控制。该回路同步精度高(达0.2mm),可自行消除两缸位置误差;伺服阀出现故障时仍可实现粗略同步。伺服阀可采用小流量阀实现放油,但成本较高,效率较低,适用于同步精度要求较高的场合。
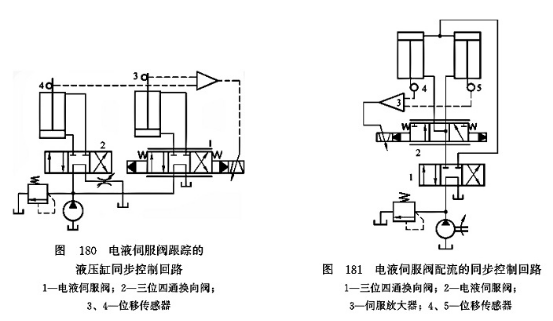
图180所示为利用电液伺服阀跟踪的液压缸同步控制回路。电液伺服阀1控制阀口开度,输出一个与换向阀2相同的流量,使两个液压缸获得双向同步运动。该回路同步精度高,但价格较贵。适用于两液压缸相隔较远,有要求同步精度很高的场合。
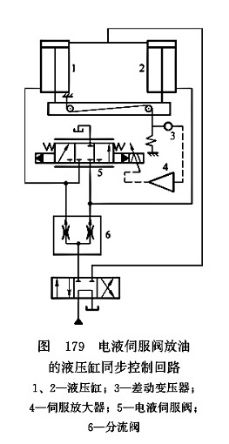
图181所示为利用电液伺服阀配流的同步控制回路。电液伺服阀2根据位移传感器4和5的反馈信号持续地调整阀口开度,控制两个液压缸的输人或输出流量,使它们获得双向同步运动。该回路的特点与图175所示回路相同。
在进行电液伺服阀维修操作前,需要对操作者进行安全培训和液压系统的排空、排气工作。同时,需要使用符合规定的工具和材料,避免损坏电液伺服阀和液压系统。
1 引言 串联电池组广泛应用于手携式工具、笔记本电脑、通讯电台以及便携式电子设备、航天卫星、电动自行车、电动汽车、储能装置中。为了使电池组的可用容量最大化及提高电池组的可靠性,电池组中的单体电池性能应该一致,从而需对单体电池进行监控,即需要对单体电池的电压进行测量。 串联电池组电压测量的方法有很多,目前应用较多的是差分检测型 与电流源检测型 两种。差分检测型需要2个电阻对的阻值严格匹配,否则将影响电池组电压的检测精度,该方法使用中为了减少检测线漏电流对电池组一致性的影响 ,需要增加电阻的阻值,这样将增加了大规模生产的难度并降低了检测精度。而电流检测型的检测电路中仅需要一个电阻对的阻值匹配,文献 中提到为了提高检测的精度
随着电力电子技术的快速发展,低功耗器件的大量应用以及更加严苛的行业标准约束,对仪器测试的精度越来越关注,开始不满足于市面上示波器幅度测试的分辨率和精度了。 示波器模数转换器ADC位数 接下来由安泰测试Agitek为您分享影响示波器测试精度的五大因素是什么呢? 为提高测试精度最理想的方式是提高示波器ADC位数,但是因为ADC采样率和垂直分辨率性能的互相制约,目前市面上常见的示波器是采用8bit ADC。我们换个角度来看,理论上用满其垂直的动态范围,分辨率就是垂直量程/ 256(2^8),如果采用12bit ADC的示波器其分辨率为垂直量程/4096(2^12)。显而易见,高比特的ADC可以在测试精度上带来非常大的提升。
的五大因素 /
TDK宣布发布Tronics AXO315,这是一款微型高性能1轴闭环MEMS加速度计,24位数字SPI接口,采用SMD封装,可达到石英传感器的性能,优于传统商用MEMS传感器,并易于集成。在工业,陆地,铁路,海军和建筑应用中常见的严酷温度和振动条件下,新型平衡加速度计具有出色的一年复合偏置可重复性1 mg的误差,可重复性误差比为600ppm。其出色性能可以令工业运动控制单元,惯性测量单元(IMU)和惯性导航系统(INS)的材料尺寸,重量和成本大大降低。 AXO315是±14 g范围内的平面线性加速度计。它的设计和开发旨在在最具挑战性的环境中提供高精度和高可靠性。在-55°C至+105°C的温度范围内,它在一年内可实现1
MEMS加速度计,可替换传统石英传感器 /
作为自动驾驶车辆和设备业界领先的惯性传感和导航系统提供商,新纳传感近日正式宣布开始商业化应用OpenARC高精度定位服务平台,该平台可以轻松实现全球导航卫星系统(GNSS)差分校正数据服务和高性能GNSS RTK/INS组合导航系统的集成。OpenARC由高精度定位服务提供商Point One Navigation鼎力支持,可为下一代高精度定位导航应用提供整体软硬件解决方案。 两家公司表示,仅依赖GNSS可能无法达到符合要求的定位精度,在理想的工作条件下只能实现米级定位精度。自动驾驶汽车系统要求位置精度优于10厘米,以满足应用的性能目标和安全目标。一个包括RTK定位引擎和由安全的地面GNSS基站网络来提供GNSS差分校正
定位平台 /
引言 模拟电路中广泛地包含电压基准(reference voltage)和电流基准(current reference)。在数/模转换器、模/数转换器等电路中,基准电压的精度直接决定着这些电路的性能。这种基准应该与电源和工艺参数的关系很小,但是与温度的关系是确定的。在大多数应用中,所要求的温度关系通常分为与绝对温度成正比(PTAT)和与温度无关2种。 近年来有研究指出,当漏电流保持不变时,工作在弱反型区晶体管的栅源电压随着温度升高而在一定范围内近似线性降低。基于该特性,带隙基准源所采用的基极-发射极结可以被工作在弱反型区的晶体管代替产生低温度系数的基准源。文献中提到采用该设计原理的基准源,利用0
CMOS带隙基准源的设计 /
摘要:讨论了比率测量方法的优点,介绍了运用感应耦合比率臂和差动式电容位移传感器设计的高精度微小位移测量系统。给出了一种实验系统的设计例子和主要的测试结果,说明了该设计在小位移测量中的有效性。 关键词:位移测量 感应耦合比率臂 电容传感器 纳米测量 各种物理量(如温度、压力、位移、振动、速度、流量与扭矩)或者是浓度、酸碱度等化学量,一般都需要用适当的传感器将其转换为电学量后才便于检测和控制。常用的电气测量方法有很多。
杏彩体育(中国).官网入口网址是国内专业的伺服电动缸厂家,杏彩体育官网入口网址主要经营伺服电动缸、伺服电缸、高精度电动缸、直连式电动缸、并联式电动缸等设备,种类型号齐全。同时汇聚电动缸行业优秀人才,产品广泛应用于汽车、模具、航空航天等行业。
咨询热线:13905180521

